About me

I am an Assistant Professor in Neural Engineering at the Faculty of Biology and Medicine of the Université de Lausanne (UNIL), and a group leader at the Lausanne University Hospital (CHUV).
|
My interests lie on the design of smart neuro-modulation therapies, that are able to dynamically interact with the nervous system using feedback of neural and motor performance, in order to correct subject-specific motor deficits that result from Parkinson's disease and related neurological disorders. My overall goal is to optimise therapies by combining recording and stimulation of multiple neural structures, simultaneously and in real-time, in order to capture and alleviate impairments that emerge from complex interactions between inter-connected dysfunctional circuits. |
|

Research experience
Deep brain stimulation therapies for Parkinson's disease
Between 2015 and 2018, I was a postdoctoral research fellow at the Nuffield Dpt. of Clinical Neurosciences at the University of Oxford (UK). I worked with Prof. Rafal Bogacz and Prof. Peter Brown as part of the MRC Brain Network Dynamics Unit, where I developed computational models and real-time control algorithms to optimise deep brain stimulation (DBS) therapies for Parkinson's disease.
Spinal cord stimulation for motor recovery after spinal cord injury
Previously, I carried out my PhD in Neuroprosthesis Control at the Automatic Control Lab at ETH Zurich, under the supervision of Prof. Manfred Morari, and in very close collaboration with the Centre for Neuroprosthetics at EPFL in Lausanne - Translational Neural Engineering Lab (Prof. Silvestro Micera) and Courtine Lab, or G-lab (Prof. Gregoire Courtine).
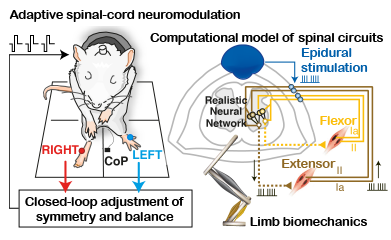
As part of the EU-funded FP7 project NEUWalk, my work focused on the development of adaptive spinal-cord stimulation paradigms with the aim to optimise gait neurorehabilitation after spinal cord injury. I used real-time monitoring of gait patterns, combined with neuro-biomechanical computational modeling, to design targetted, closed-loop stimulation approaches capable of adapting to the ongoing performance of each subject. Experimental tests in various rodent models of SCI showed the benefits of personalising spinal-cord stimulation to maximise gait quality, weight bearing and endurance.
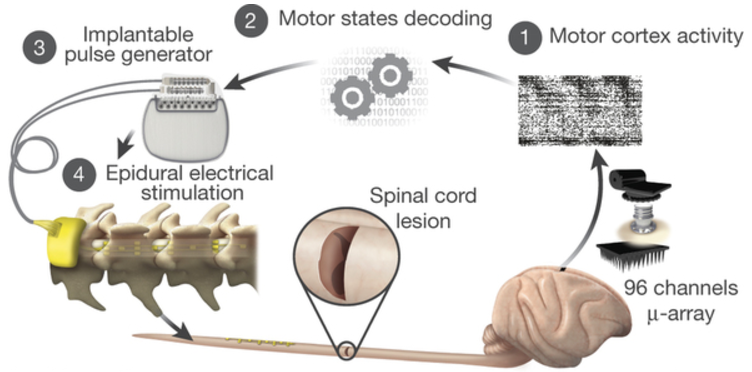
In addition, I worked on the development of a brain-spinal interface, which allowed to reconnect spinal and cortical circuits through an artifical by-pass around the injury site in non-human primates. This brain-controlled neuro-modulation therapy restored mobility of the paralysed limb within days of implantation.
Similar technology is currently being employed in the framework of a clinical trial on patients, with very promising preliminary results that assert the clinical suitability of these methodologies.
Previous activities
A.I. for Space
Previously, I worked as a Young Graduate Trainee (YGT) in Artificial Intelligence and NeuroInformatics at the European Space Agency's Advanced Concepts Team in Noordwijk, Netherlands. I was involved in several projects dealing with Robotics, A.I. and bioengineering, together with Dr Dario Izzo, Dr Tobias Seidl and Dr Christos Ampatzis. Among others, we carried out studies on how to clone human curiosity into autonomous agents, we organised an international conference on the use of BMIs in space for increasing astonaut capabilities , and explored biomimetic navigation strategies to improve efficient planet exploration by rovers.
In addition, the ESA Advanced Concepts Team was accepted as mentoring organisation for the 2010 Google Summer of Code (GSoC) on its Open Software 'PaGMO' (Parallel Global Multiobjective Optimizer). I took part as mentor for an A.I. project that aimed to combine the optimisation capabilities offered by PaGMO with evolutionary robotics paradigms: evolving walking behaviors in a low-gravity environment... Check out the evolution and results of the Alife on asteroids project!
...Have a look at the description of our group on the ESA Official Bulletin from November 2010 (pages 36 and onwards) |
Neuromorphic olfaction
Prior to that, I spent one year working as Associate Engineer at INRIA (the French National Institute for Research in Computer Science and Control), within the research project 'Cortex: neuromimetic intelligence'. Together with Dr. Dominique Martinez, we evaluated robotic navigation strategies for scent tracking and odor source localisation. We showed that infotactic strategies, based on information maximisation, are robust and highly efficient even when implemented in a real robot under turbulent conditions, where cues are scarse and information unrealiable. Biomimetic characteristics were also preserved.
Academic training
I obtained my MSc Degree (Dist. awarded) in Artificial Intelligence and Robotics from Edinburgh University. For my thesis, I worked with Dr Ian Saunders and Prof Sethu Vijayakumar on the role of artificial feedback in prosthesis control, and how it is employed by people in conjunction with their natural senses to manipulate a fully articulated prosthetic hand (see: i-limb description).
I previously obtained a joint Engineering Degree from Ecole des Mines ParisTech, France ('Grande Ecole' Program, minor in Control Systems) and Universidad Politécnica de Madrid, Spain (Electrical and Computer Engineering). I carried out my Final Year Research Project in the Computational Neuroscience Lab at ATR International (Japan), where I worked with Dr. Joshua Hale and Dr. Gordon Cheng in humanoid robotics simulation and control. The project studied ground contact in biped locomotion, and in particular how to model the ground reaction forces that sustain the body in a dynamics simulator for humanoid robots, and then validate their distribution during several biped tasks with respect to real humans.
This project was awarded the 1st prize by the French Embassy in Spain to the best research project carried out within a Double Degree programme between Spain and France... see the interview (sorry in Spanish)
 |
Eduardo Martin Moraud 2023. 3D designs and photography by Jimmy Ravier. All rights reserved